Simulation data
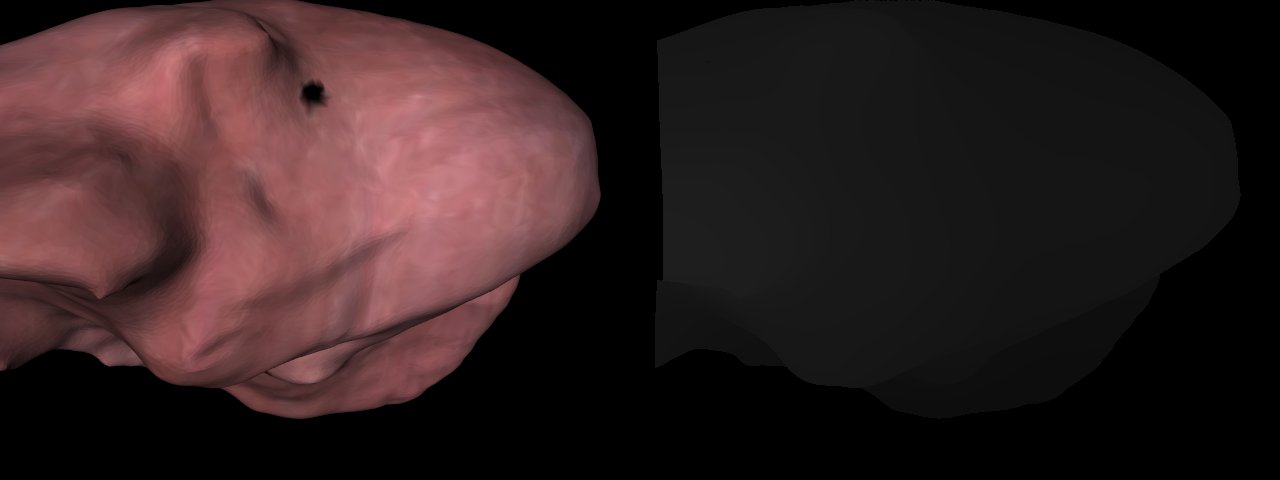
Below you can find several image sequences taken from a liver by using a simulated stereo endoscope. Provided are stereo image pairs and ground truth data sutible for evaluating methods for reconstruction and optical flow. The archives contain for each time step the following data:
- Left and right camera images (scene_left*.bmp and scene_right*.bmp)
- Pose of the camera (data*.xml). The pose is saved in the form of a quaternion and a translation vector (qx qy qz qw tx ty tz)
- The coordinate of the object point that was projected onto each pixel in the left camera image (ground3d*.txt)
- The disparity value for each pixel in the left image, mapping it to a pixel in the right image (disground*.txt)
The camera calibration can be found here. The format used is illustrated here
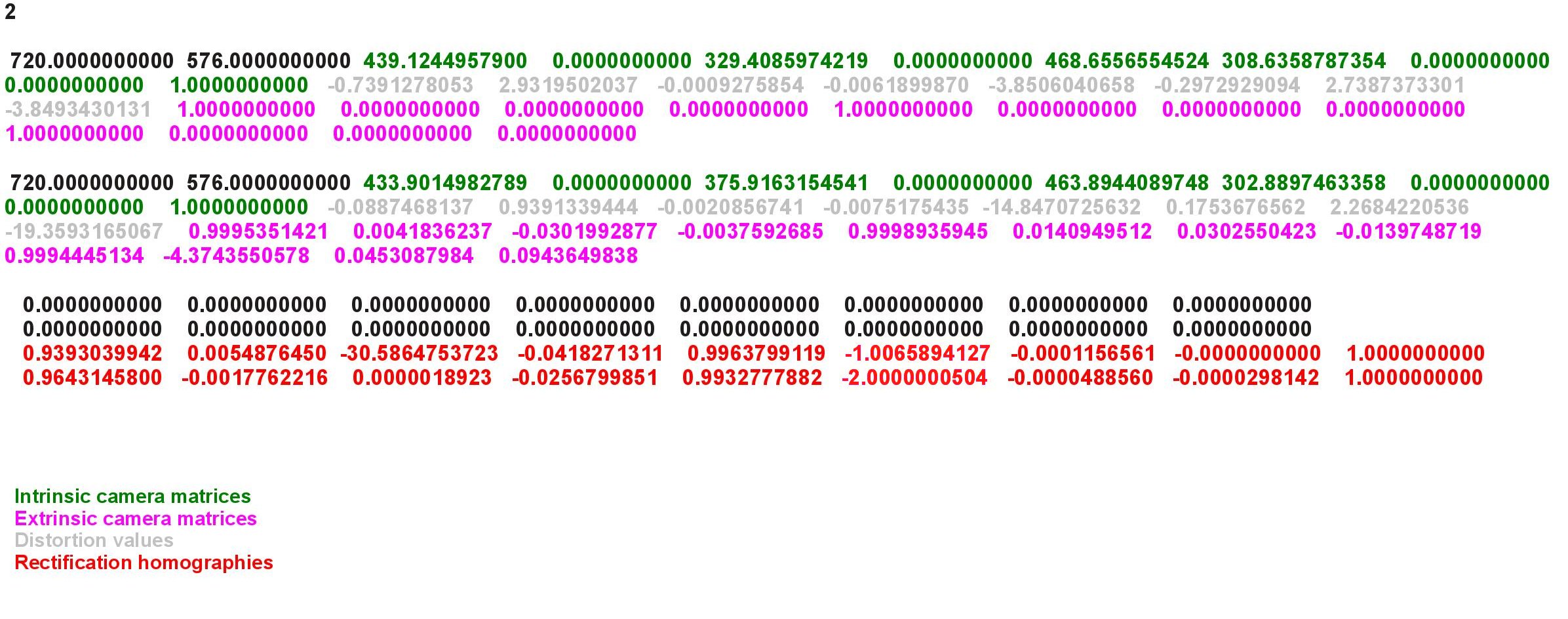{kind=link}
Sequences
| Liver Model, Zoom sequence | Download | [1] |
| Liver Model, Circle sequence | Download | [1] |
| Liver Model, Deformation sequence | Download | [1] |
Reference
If you use this dataset, please cite the following paper:
[1] S. Röhl, S. Bodenstedt, S. Suwelack, H. Kenngott, B.P. Mueller-Stich, R. Dillmann, S. Speidel: Dense GPU-Enhanced Surface Reconstruction from Stereo Endoscopic Images for Intraoperative Registration. Med Phys, 39(3):1632-45, 2012.